这一周我们将学习到如何利用 CNN 进行图片风格转换和人脸识别。
人脸识别
什么是人脸识别或人脸校验
- 人脸校验
- 输出图片,姓名或身份号
- 输出是否输入图片是对应的那个人
- 这是一个 1:1 问题
- 人脸识别
- 有 K 个人的数据库
- 输入图片
- 输出这个人的 ID 号,如果它是这 K 个人之一的话,如果不是,输出“未识别”
- 这是一个 1:K 问题
单样本学习 one-shot learning
单样本学习指的是用一张样本照片进行学习,然后再次识别出这个人。由于只有一个样本,所以如果直接输入到 CNN 进行训练,效果非常不好。
正确的做法是学习出一个“相似度”函数 d(img1, img2),它等于两个图片的不同程度,如果 $d(img1, img2) \le \tau$,那么这两张图片就是一个人,如果反之,这不是一个人。
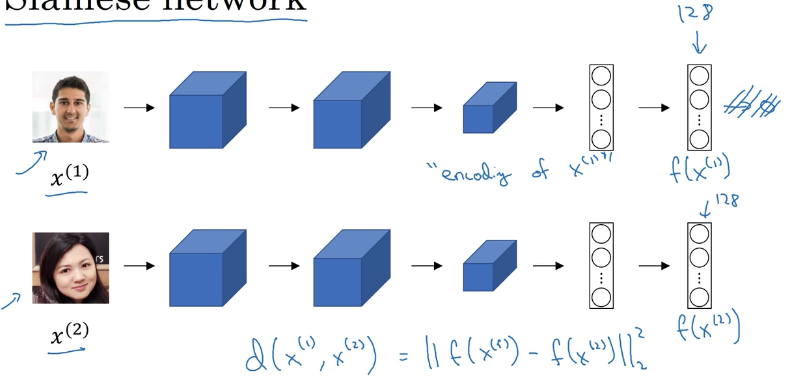
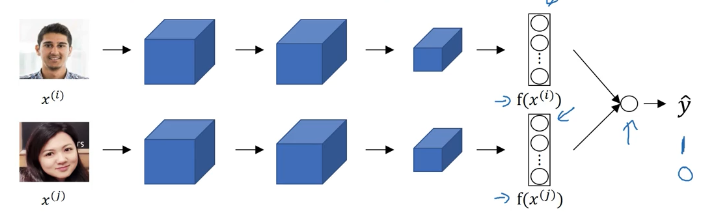
孪生网络 Siamese network
[Taigman et. al., 2014. DeepFace closing the gap to human level performance]
假设我们有两张图片 $x^{(1)}, x^{(2)}$,我们将它们通过一个卷积网络,输出两个编码向量 $f(x^{(1)})$ 和 $f(x^{(2)})$,训练这个网络,使得我们确信这个编码是对这两张图片的良好表达,这个相似度函数就是两张照片的编码的差的范数。
这个概念被称作孪生网络。
如何训练?
- 神经网络的参数定义了图片的一个编码 $f(x^{(i)})$
- 学习参数使得:
- 如果 $x^{(i)}$ 和 $x^{(j)}$ 是同一个人,那么 $||f(x^{(1)})-f(x^{(2)})||^2_2$ 就很小
- 如果 $x^{(i)}$ 和 $x^{(j)}$ 是不同的人,那么 $||f(x^{(1)})-f(x^{(2)})||^2_2$ 就很大
三元损失函数 Triple Loss
引例
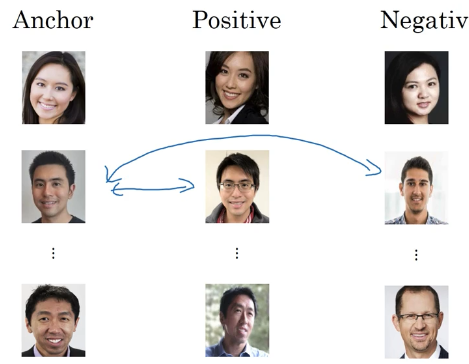
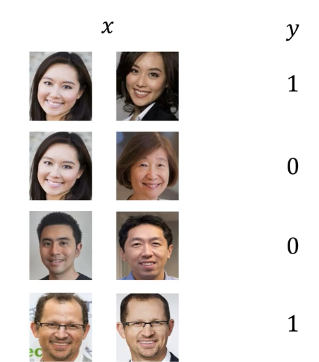
首先我们有一个“锚 Anchor”照片 A,如果另一张照片和这个锚照片是同一个人,着称之为“正例 Positive” P,反之称为“反例 Negative” N,如下图所示:

我们期望的是 A 和 P 的差距 d(A, P) 要小于 A 和 N 的差距 d(A, N),即:
但是为了防止神经网络把 f(A) 和 f(P) 和 f(N) 训练得特别接近,例如当它们都为 0 时,上式仍然满足,为了防止神经网络输出退化解,增大 d(A, P) 和 d(A, N) 之间的差距,我们增加一个超参数 margin $\alpha$,式子变成:
当 d(A, P) = 0.5 时,加上 $\alpha$ = 0.2,则 d(A, N) 至少为 0.7,使得 d(A, P) 远小于 d(A, N)。
三元损失函数定义
给定三个图片 A,P,N:
总的代价函数为:
我们必须保证每个人不止一张照片,假设训练集为 1000 个人的 10000 张照片,我们需要拿这 10000 张照片去生成上式的三元组。
如何选择三元组 A, P, N
在训练时,如果你随意选择 A,P,N,那么 $d(A, P) + \alpha \le d(A,N)$ 这个式子会非常容易满足,因为如果随便挑的 d(A, P) 会有很大几率远小于 d(A, N),这样导致神经网络无法从中学到东西。
我们需要做的是挑选那种很难训练的三元组,使得你挑的 A, P, N 会让 d(A,P) 很靠近 d(A,N),这样使得算法在学习的时候要花更多的力气尝试让右边这一项增大,左边这项减小,也就是使得:
更多三元组选择方法见这篇论文。
人脸识别的二元分类方法
除了三元损失函数,我们还有其他的定义损失函数的方法。
还有一种变种 $\chi ^2$ 相似度:
一个小技巧是我们不必每次都计算数据库中的图片的编码值,我们可以先进行预计算,在进行识别时直接跟这些预计算的编码值进行比较,然后预测结果 y.
神经风格转化 Neural style transfer
什么是神经风格转化
深度卷积网络的可视化
假设我们正在训练这样一个网络:

为了知道每一层到底在计算什么,并将其可视化,我们可以在这层挑出一个神经元,找到使得这个神经元激活值最大的九个图像小块。在更深的层,隐藏单元能看到更大一部分图像,即更大图像对这些层的输出有影响,我们将每一层可视化,如下图所示。

我们可以看到,第一层在检测一些边缘特征,随着层数的加深,检测的对象越来越复杂。
代价函数
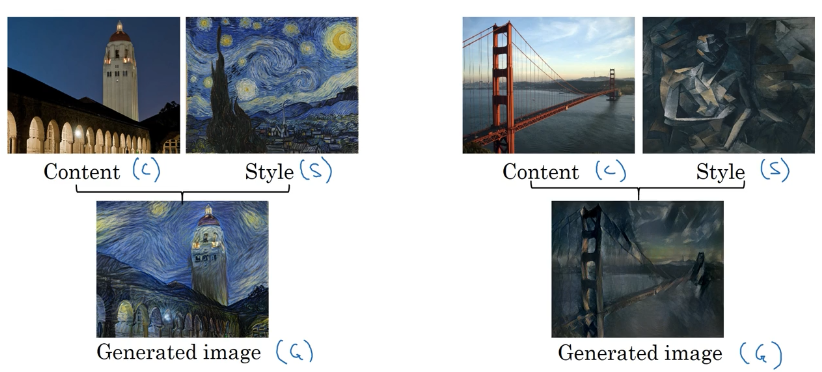
[Gatys et al., 2015. A neural algorithm of artistic style. Images on slide generated by Justin Johnson]
问题的形式是:我们有一张“内容 content 图片” C,一张“风格 style 图片” S,得到一个“生成 generated 图像” G。我们需要一个代价函数 J(G) 来评价某个图像生成的质量有多好,用梯度下降使得 G 的损失最小,从而生成想要的图像。
代价函数分为两部分: 内容代价函数,表示生成图像和内容图像之间的相似程度,以及风格代价函数,表示生成图像和风格图像之间的相似程度,再加上两个系数表示风格代价和内容代价之间的比重。
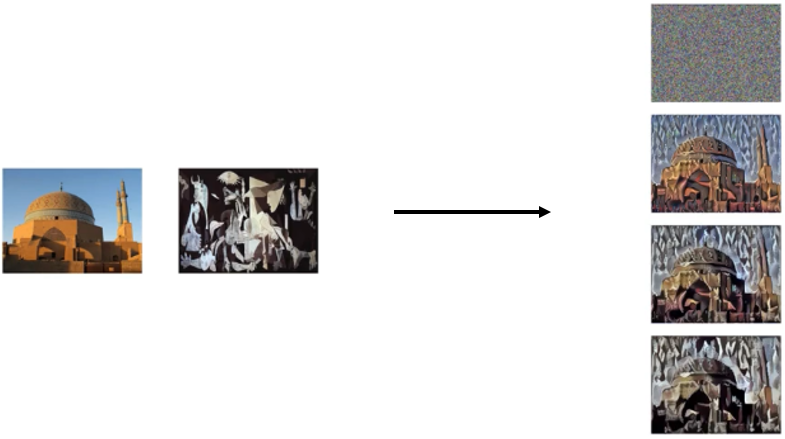
如何生成 G:
- 将 G 随机初始化
- G : 100×100×3
- 使用梯度下降最小化 J(G)
- $G:=G- \frac{\partial J(G)}{\partial G}$ 不同于更新权重,我们通过梯度下降更新 G 的像素值来最小化 J(G)
内容代价函数
- 假设使用 $l$ 个隐藏层来计算内容代价函数
- 使用预训练的卷积网络,比如 VGG 网络
- 分别将内容图片 C 和生成图片 G 输入这个网络,假设 $a ^ { [ l ] ( C ) }$ 和 $a ^ { [ l ] ( G ) }$ 分别是第 $l$ 层的内容图像 C 和生成图片 G 的激活值
- 如果 $a ^ { [ l ] ( C ) }$ 和 $a ^ { [ l ] ( G ) }$ 很接近,那么两张图片就有相似的内容,所以内容代价函数为:
风格代价函数
如何定义一张图片的“风格”

假设我们使用方框框起来的那一层的激活值来测量“风格”,我们把“风格”定义为这一层的激活值的不同通道之间的相关性。
关于图片风格的解释
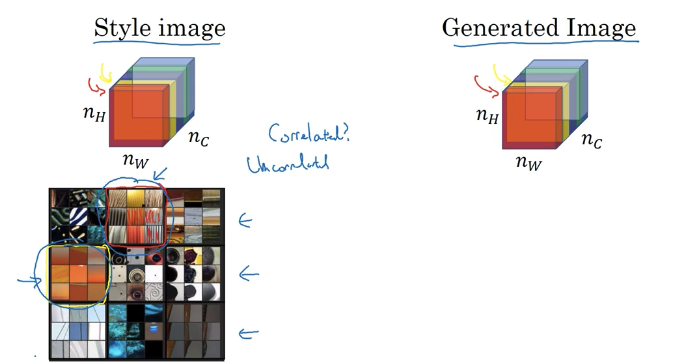
假设红色通道表示红框框起来的特征(那些竖条纹),黄色通道表示黄框框起来的特征(即那些橘红色的图块),那么,红色通道和黄色通道的相关性,可以告诉你在图片中这种竖条纹和橘色图块是否经常同时出现,这是“风格”的一种衡量方式。
风格矩阵
我们需要过给定的图像计算出风格矩阵,风格矩阵会记录上一张幻灯片中我们提到的所有相关性。
- $a^{[l]}_{i,j,k}$ 是第 $l$ 层在(i, j, k)这个位置的激活值,i 是高度,j 是宽度,k 是通道
- $G^{[l]}$ 是形状为 $n^{[l]}_c×n^{[l]}_c$ 的风格矩阵,$n^{[l]}_c$ 是第 l 层的通道数
- kk’ 表示第 k 个通道和第 k‘ 个通道的相关性,在风格矩阵的第 k 行第 k’ 列
- 线性代数中 G 矩阵被称为格拉姆矩阵 gram matrix
风格代价函数
- $\frac { 1 } { \left( 2 n _ { H } ^ { [ l ] } n _ { W } ^ { [ l ] } n _ { C } ^ { [ l ] } \right) ^ { 2 } }$ 是不重要的标准化系数
如果我们需要将不同层的风格代价函数都考虑进去,那么式子变成:
- $\lambda$ 为一个可调整的超参数
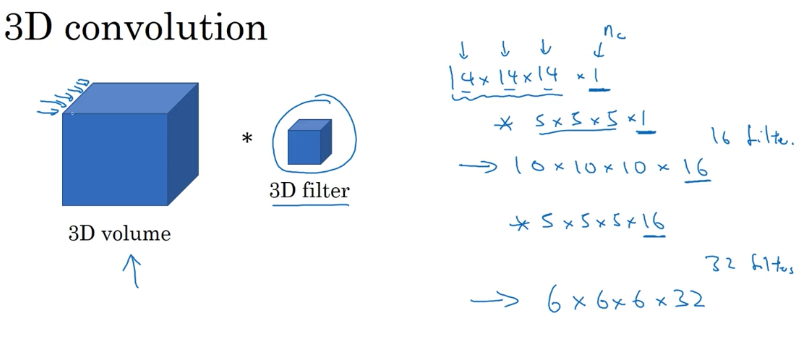
1D 和 3D 卷积
2D 到 1D 的推广
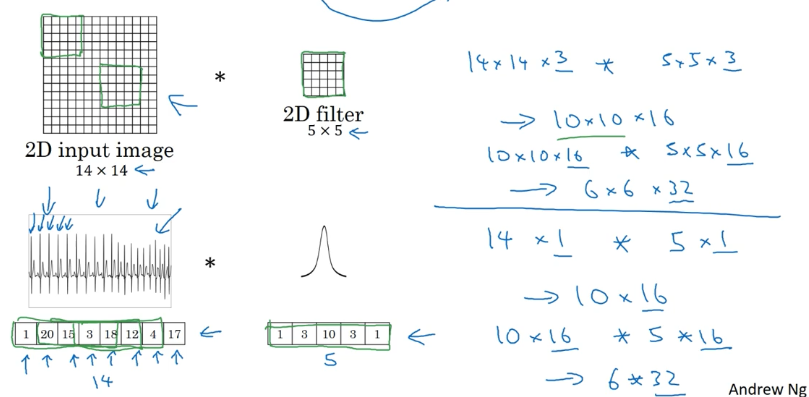
2D 到 3D 的推广